
Overzicht
Brugkraan, algemeen bekend als "rijden", is een soort hefmachine die veel wordt gebruikt in industriële en mijnbouwbedrijven. Het bedieningsmechanisme bestaat uit drie in wezen onafhankelijke aandrijfsystemen: auto-aandrijfsysteem, haakaandrijfsysteem, K-DRIVE-omvormer voor de Bovenstaande drie aandrijfsystemen zijn met succes hervormd, het volgende beschrijft voornamelijk het transformatieproces van het rijden voor en na het loopsysteem.

Schema Voordelen
- Veldgeoriënteerde vectorregeling met open lus, volledig ontkoppelde motorvariabelen, groot laagfrequent koppel, snelle respons, enz.;
- De KD600 maakt gebruik van de PG-vrije vectorbesturingsmodus met open lus en de gevectoriseerde V/F-modus, en versterkt de vermogensniveauconfiguratie van de eerste versnelling;
- Frequentiebereik: 0,5-600 Hz segmentinstelling, traploze continue aanpassing;
- Werkspanningsbereik: 380V ± 20%, en de busspanning daalt onmiddellijk naar 360VDC voor een probleemloze werking;
- Overbelastingscapaciteit: 150% van de nominale stroom, 1 minuut toegestaan; 200% nominale stroom, 1s toegestaan;
- Koppelkarakteristieken: startkoppel, groter dan 2 maal het nominale koppel; Laagfrequent koppel, groter dan 1,6 keer het nominale koppel bij 1 Hz; Het remkoppel is groter dan het nominale koppel.
Bedrijfskenmerken
- Het kraanhefmechanisme heeft een groot startkoppel, dat doorgaans hoger is dan 150% van het nominale koppel. Als er rekening wordt gehouden met overbelasting en andere factoren, moet tijdens het start- en acceleratieproces ten minste 200% van het nominale koppel worden geleverd;
- Wanneer het hefmechanisme naar beneden draait, bevindt de motor zich in een regeneratieve energieopwekkingsstatus en moet hij energieverbruik remmen of regeneratieve feedback aan het elektriciteitsnet geven;
- De belasting van het hefmechanisme verandert dramatisch wanneer het opgeheven voorwerp de grond verlaat of raakt, en de frequentieomvormer moet de impactbelasting soepel kunnen regelen;
- Omdat de rijsnelheid van het voorste en achterste rijmechanisme van de kraan tijdens het mechanische ontwerp niet hoog is, kan de omvormer worden gebruikt voor de juiste oversnelheid om de werkefficiëntie te verbeteren.
Eenvoudig bedradingsschema
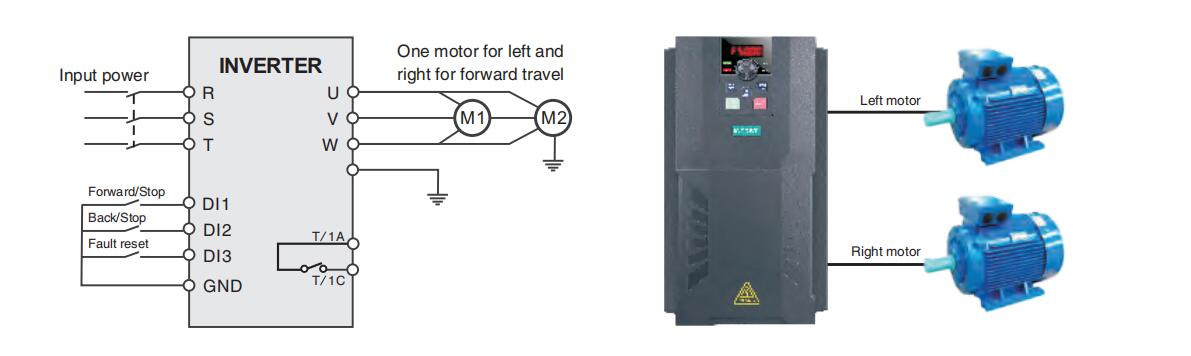
Parameterinstelng en beschrijving(linker- en rechtermotorbewegingsparameters)
| Parameter | Uitleggen | Parameterinstelling | Uitleggen |
| P0-00=0 | VF-controle | P5-00=1 | vooruit |
| P0-04=1 | Externe terminal start stop | P5-01=2 | achteraf uitvoeren |
| P0-06=1 | Digitale frequentie-instelling | P6-00=2 | Relais 1 foutuitgang |
| P0-14=60,00 | Maximale frequentie | P4-01=1,6 kW | Aangesloten motorvermogen |
| P0-16=60,00 | Bovengrensfrequentie | P4-02=380V | Nominale motorspanning |
| P0-11=60,00 | Digitale instelfrequentie | P4-04=3,3A | Nominale motorstroom |
| P0-23=3,0s | Acceleratie tijd | P4-05=50 Hz | Nominale frequentie van de motor |
| P0-24=2,0s | Vertragingstijd | P4-06=960R/Min | Nominaal toerental van de motor |
| Opmerking: Wanneer één frequentieomvormer wordt gebruikt met twee motoren, wordt sterk aanbevolen om een passend thermisch relais aan de voorkant van elke motor te installeren om elke motor te beschermen. | |||
Analyse van werkingseffecten
De frequentieomvormer uit de KD600-serie heeft frequentieomzettingstransformatie op het reizende systeem uitgevoerd en het transformatie-effect is relatief ideaal, voornamelijk weergegeven in:
- De soft start en soft stop tijdens het opstarten worden gerealiseerd waardoor de impact op het elektriciteitsnet verkleint;
- Na gebruik van de frequentieomvormer worden de oorspronkelijke schuifschakelaar en snelheidsregelweerstand weggelaten, wat niet alleen de onderhoudskosten bespaart, maar ook de uitvaltijd voor onderhoud vermindert, waardoor de output toeneemt;
- Wanneer de hoofdhaak werkt op 5 Hz ~ 30 Hz, is het energiebesparende effect heel duidelijk;
- De frequentieomvormer wordt gebruikt om de voor- en achterwaartse beweging te regelen, en de linker en rechter bewegingsmechanismereeksen kunnen het overfrequentiewerk realiseren. Onder het uitgangspunt van het garanderen van de veiligheid wordt de werkefficiëntie aanzienlijk verbeterd en wordt ook de onderhoudswerklast van de reizende apparatuur als gevolg van frequente vervanging van AC-schakelaars verminderd.
Slotopmerkingen
De frequentieomvormer wordt gebruikt om de voor- en achterloopmechanismen en de linker- en rechterloopmechanismereeksen te besturen, die overklokwerk kunnen realiseren, de werkefficiëntie aanzienlijk kunnen verbeteren onder het uitgangspunt van het waarborgen van de veiligheid, en ook de onderhoudswerklast van aandrijfapparatuur kunnen verminderen als gevolg van frequente vervanging van AC-schakelaars.
Toepassingssite

Posttijd: 17-nov-2023